Storyboard Anwendungs-Demos für Renesas RZA1, mit RGA Support
Testen Sie Storyboard basierte Anwendungen auf Ihrer Renesas RZA1H Hardware mit dem Crank Software Demo Image.



Alan Hawse, evangelist and 26-year veteran at Cypress Semiconductors, has published an informative blog post detailing how you can integrate Percepio Tracealyzer into Cypress’ developer toolset PSoC Creator. It is the first in a series of Tracealyzer posts he promises to push out over the coming weeks.
For the details, check out Alan Hawse's blog post at IoT Expert
Der Modbus TCP-Client des Barracuda Applikations-Servers ist eine Ethernet-Implementierung des weit verbreiteten Modbus-Protokolls.
Der Modbus-Client wurde entwickelt, um die Verbindung von Modbus-Produkten mit modernen IoT-Geräten, HTML5-basierten HMIs sowie die sichere Verbindung von Modbus-Produkten mit dem Internet und Cloud-Servern zu ermöglichen. Zusätzlich ermöglicht der Modbus-Client Anwendungsentwicklern das Design von Steuerlogik in der leicht erlernbaren Skriptsprache Lua. Anwendungsentwickler können nun einfach Code für die Steuerung beliebig vieler Modbus-fähiger Produkte entwerfen.

NXP FTF Connects in San Jose brings together developers, thought leaders, vendors, and OEMs for two days of education and inspiration around the Internet of Things (IoT) and autonomous vehicle revolution.
Crank Software is there to showcase the latest in automotive HMI and IoT user interface (UI) development, including the only platform that lets designers and developers work side-by-side to create amazing user experiences on a wide range of NXP products – Storyboard Suite.
Im Embedded Computing Design Magazin ist ein interessanter Artikel erschienen
With no signs of the IoT economy slowing down—IHS Markit reports that we’ll hit over 75 billion devices by 2025—the challenge for embedded development teams is figuring out how to modernize legacy systems and create new ones that leverage the latest technologies to meet user expectations. It comes down to squeezing the best functionality and performance out of a dizzying array of platform architectures, operating systems (OSs), and software stacks, while delivering simple, beautiful user experiences (UX) that drive user adoption and brand loyalty
Auf dem Embedded Software Engineering Portal ist ein interessanter Grundlagenartikel erschienen.
Using an RTOS has almost become a necessity when developing a real-time embedded system. The problem is that many developers are just starting to use an RTOS and are not familiar with the methodologies and techniques necessary to quickly and efficiently debug their RTOS based application code. In this webinar, attendees will become familiar with the latest and greatest techniques and tools necessary to debug their code. Important concepts such as properly sizing thread stacks, using event viewers and discovering issues such as priority inversions, deadlock and thread starvation will be examined. The webinar will provide hands-on demonstrations using the NXP's K64 Freedom Board which uses as ARM Cortex-M4 processor with the Keil MDK toolchain, RTX5 RTOS and Percepio’s Tracealyzer.
![]()
Percepio AB, führender Entwickler von RTOS-Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben Tracealyzer in der Version Version 3.1.2 für das RTOS RTX5 von ARM® Keil® herausgebracht.
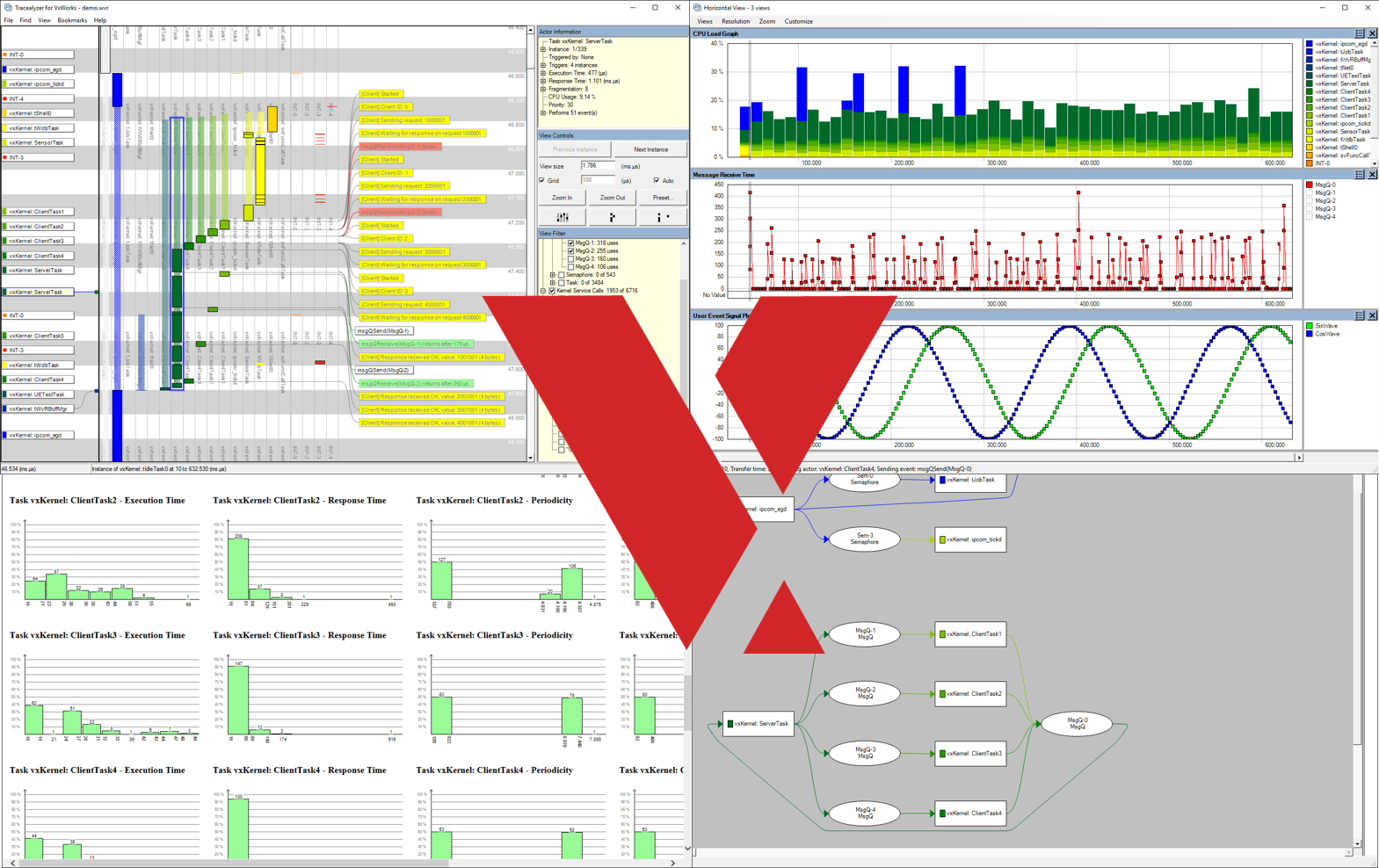 Percepio AB, führender Entwickler von RTOS-Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben eine aktualisierte Version 3.1.2 von Tracealyzer für Wind River VxWorks herausgebracht
Percepio AB, führender Entwickler von RTOS-Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben eine aktualisierte Version 3.1.2 von Tracealyzer für Wind River VxWorks herausgebracht
Hier gelangen Sie direkt zum Download.
Lesen Sie den Artikel von Wilfred Nilsen hier online auf DZone Security Zone

Percepio AB, führender Entwickler von RTOS-Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben Tracealyzer in der Version Version 3.1.2 für das RTOS ThreadX von Express Logic herausgebracht.
Percepio AB, weltweit führender Entwickler von RTOS-Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben eine aktualisierte Version 3.1.2 von Tracealyzer herausgebracht, als Wartungsrelease der 3.1.1. Hier finden Sie den Download dazu.
![]()
![]() Crank Software Inc. hat sich nach dem großen Interesse am Thema GUI-Entwicklung im letzten Jahr entschieden auch auf der Embedded World 2017 wieder präsent zu sein.
Crank Software Inc. hat sich nach dem großen Interesse am Thema GUI-Entwicklung im letzten Jahr entschieden auch auf der Embedded World 2017 wieder präsent zu sein.
Crank Software stell die brandneue Version 5.0 der Storyboard Suite vor, kommen Sie vorbei und lassen sich die neuen Features zeigen!
![]()
![]()
Percepio hat sich nach dem großen Interesse am Tacealyzer im letzten Jahr entschieden auch auf der Embedded World 2017 wieder präsent zu sein.

What's New in Storyboard Suite 5.0
Percepio AB, weltweit führender Entwickler von RTOS-Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben eine aktualisierte Version 3.1.1 von Tracealyzer herausgebracht, als Wartungsrelease der 3.1 aus Dezember 2016. Die westenliche Erweiterung besteht aus einem neuen Plugin für Eclipse.
Hier finden Sie den Download dazu.
Costa Mesa, Kalifornien, 1. März 2017
Die Sicherheit bestehender ARM Cortex-M-basierter Produkte lässt sich durch die Nutzung eines neuen Produkts von Micro Digital erheblich verbessern. MPU-Plus ™ ermöglicht eine höhere Sicherheit für bereits ausgelieferte oder zu entwickelnde Systeme durch eine effektive Nutzung der Memory Protection Unit (MPU), die in den meisten Cortex-M-Prozessoren vorhanden ist.
![]()
![]()
SOMNIUM hat sich nach dem großen Interesse am SOMNIUM DRT im letzten Jahr entschieden auch auf der Embedded World 2017 wieder präsent zu sein.
Whether it’s commuting to and from work, chauffeuring the kids to hockey*, or running errands, we spend countless hours driving on a daily basis. Fortunately for those of us who feel like we live part-time in our cars, technology is evolving at a rapid rate to enhance the driving experience and to allow us to connect with our vehicles more seamlessly and safely.

Whether a team is creating an application for automotive, medical, industrial, or a white goods product, there’s a core set of capabilities that the UI development framework they choose to work with has to be able to deliver, regardless of the target market. When we talk with customers during their development process and when we meet designers and developers at trade shows and events we tend to hear common themes of challenges and requirements, such as:
MQTT is a publish/subscribe protocol that has gained popularity as an IoT protocol. MQTT clients connect to a broker which is in charge of exchanging the messages sent between the connected clients. MQTT includes many features that may leave the MQTT solution open to hackers. In this article, I will show you how easy it is to find unprotected MQTT brokers on the Internet and how to eavesdrop on all messages exchanged via the unprotected brokers.
Percepio AB, weltweit führender Entwickler von Visualisierungs-Tools für Embedded-Software-Entwickler, hat soeben eine aktualisierte Version 3.1 von Tracealyzer für FreeRTOS und Micrium herausgebracht.
Herr Schmid stand Ihnen auf dem ESE Kongress 2016 in der Ausstellung für Gespräche zur Verfügung. Vielen Dank für die zahlreichen guten Gespräche und Ihr Interesse an den Lösungen.
Die Lösungen unseres Partners Percepio (Niclas Lindblom rechts im Bild) fanden ebenfalls großen Zuspruch.

![]()
Percepio finden Sie auf dem ESE Kongress 2016 in der Ausstellung bei Embedded Tools. Lassen Sie sich dort den Tracealyzer zeigen, das Werkzeug zur Visualisierung von Laufzeitdaten aus (RT)OS basierten embedded Systemen.
© Embedded Tools GmbH | Schlikötterstiege 61 | 48161 Münster | Germany/Deutschland | Datenschutzerklärung | Impressum